


📢 转载信息
原文链接:https://www.sciencedaily.com/releases/2026/01/260105165815.htm
原文作者:University of Pennsylvania School of Engineering and Applied Science
科学家创造出比盐粒还小、能自主思考的机器人
研究人员创造了微型、由光驱动的机器人,它们可以思考、游泳并存活数月。
宾夕法尼亚大学和密歇根大学的研究人员制造出了有史以来最小的、完全可编程的自主机器人。这些微型机器可以在液体中游泳、感知周围环境、自主做出反应、持续运行数月,而且每个成本仅约一美分。
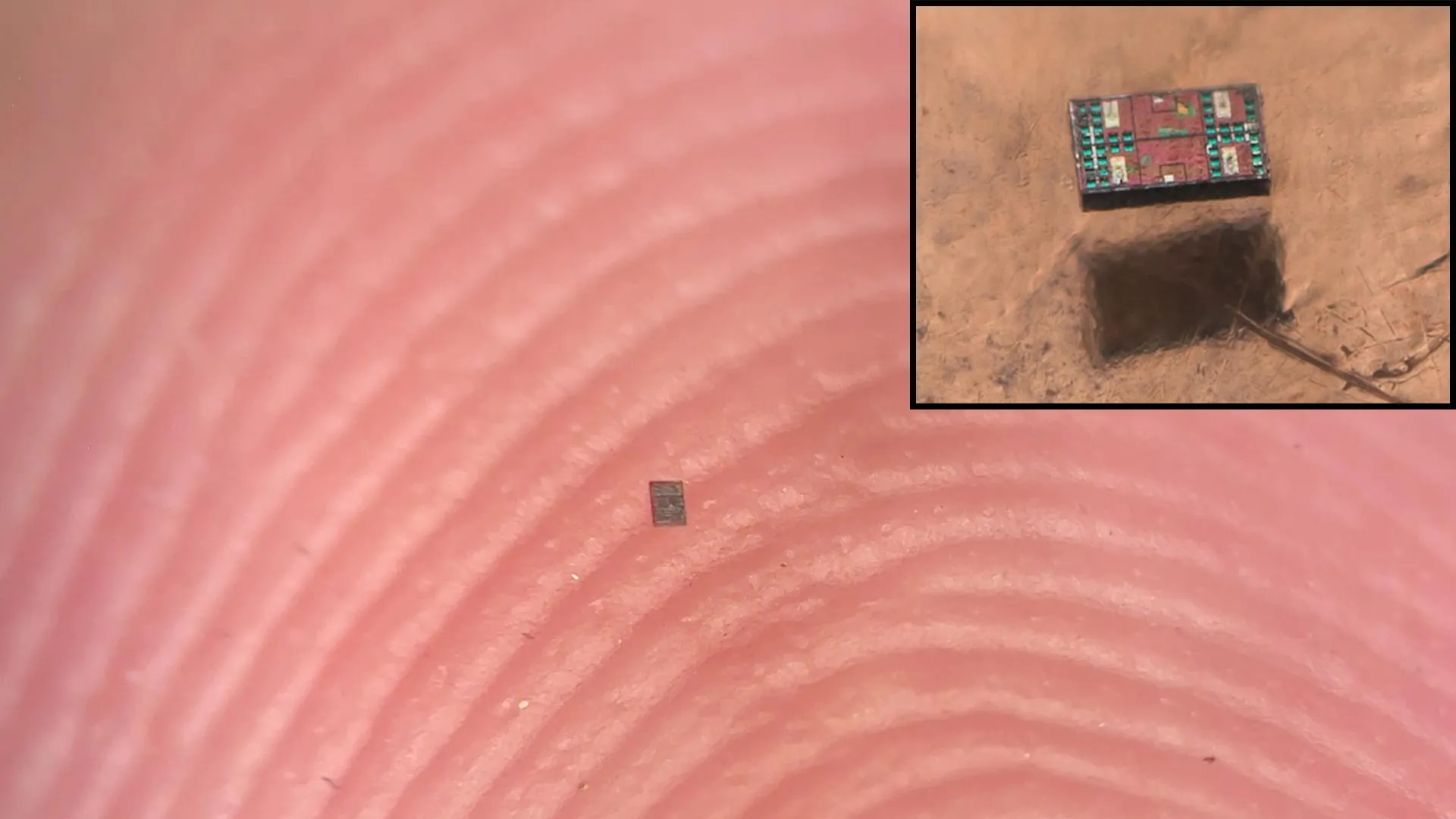
每个机器人几乎看不见,没有放大镜就难以察觉,尺寸大约为200 x 300 x 50微米。这使得它们比一粒盐还要小。由于它们在与许多活体微生物相同的尺度上运行,这些机器人未来可能帮助医生监测单个细胞,或协助工程师组装先进制造中使用的微小设备。
这些机器人完全由光驱动,内置的微型计算机使它们能够遵循预设路径、检测局部温度变化并相应地调整运动。
这项工作已发表在《科学机器人学》(Science Robotics)和《美国国家科学院院刊》(PNAS)上。与以往的微型机器不同,这些机器人不依赖电线、磁场或外部控制。这使它们成为在该微小尺度上首批真正自主和可编程的机器人。
宾夕法尼亚大学工程学院电气与系统工程助理教授、论文的资深作者Marc Miskin说:"我们制造出了小10,000倍的自主机器人。这为可编程机器人在一个全新的尺度上开辟了可能。"
为什么缩小机器人如此困难
在过去的几十年里,电子产品不断缩小,但机器人技术并未遵循相同的轨迹。据Miskin介绍,一毫米以下的独立操作一直是一个尚未解决的难题。他说:"在小于一毫米的尺寸下制造独立运行的机器人极其困难。该领域在过去40年里基本上一直被这个问题困扰着。"
在日常尺度下,运动受重力和惯性等力的影响,这些力取决于物体的体积。然而,在微观尺度上,表面相关的力占了主导地位。阻力和粘度变得势不可挡,极大地改变了运动方式。Miskin说:"如果你足够小,在水中推动就如同在推粘稠的焦油一样。"
由于这种物理学的转变,传统的机器人设计失效了。微小的手臂或腿很容易折断,而且极难制造。Miskin解释说:"非常微小的腿和手臂容易损坏,而且也很难制造。"
为了克服这些限制,研究人员开发了一种全新的机器人移动方式,它顺应微观世界的物理规律,而不是与之对抗。
微型机器人如何游泳
鱼类和其他大型游泳物通过将水向后推来产生前进的运动,这遵循牛顿第三定律。这些微型机器人的方法截然不同。
这些机器人不是通过弯曲或摆动,而是产生一个电场,轻轻地推动周围液体中的带电粒子。当这些离子移动时,它们会将附近的水分子拉动过去,从而在机器人周围的流体中产生运动。Miskin说:"这就像机器人身处一条流动的河流中,但机器人本身也在引起河流的流动。"
通过调整这个电场,机器人可以改变方向、遵循复杂的路径,甚至可以在类似鱼群的群体中协调它们的运动。它们可以达到每秒一身体长度的速度。
由于这种游泳方法使用没有活动部件的电极,这些机器人非常耐用。据Miskin介绍,它们可以通过微移液器反复转移到不同的样本中而不会损坏。机器人由LED灯供电,可以持续游泳数月之久。
将智能装入微型身体
真正的自主性需要的不仅仅是移动能力。机器人还必须能够感知其环境、做出决策并为自己供电。所有这些组件都必须安装在一个只有零点几毫米大小的芯片上。密歇根大学的David Blaauw团队承担了这一挑战。
Blaauw的实验室已经拥有制造世界上最小计算机的记录。五年前,当Blaauw和Miskin在国防高级研究计划局(DARPA)的一次演讲中相遇时,他们很快意识到他们的技术是互补的。Blaauw说:"我们看到,宾夕法尼亚大学工程学院的推进系统和我们的小型电子计算机简直是天作之合。" 尽管如此,将这一想法转化为一个可工作的机器人仍然需要五年的开发时间。
最大的障碍之一是能源。Blaauw说:"电子设备面临的关键挑战是太阳能电池板很小,只能产生75纳瓦的功率。这比智能手表消耗的功率要少十万倍以上。" 为了使系统工作,团队设计了在极低电压下运行的专用电路,将功耗降低了1000倍以上。
空间是另一个主要限制。太阳能电池板占据了机器人表面的大部分面积,为计算硬件留下的空间非常少。为解决这个问题,研究人员重新设计了机器人的软件工作方式。Blaauw解释说:"我们必须完全重新思考计算机程序指令,将通常需要多条推进控制指令压缩成一条特殊的指令,以缩短程序长度,使其能够装入机器人微小的存储空间中。"
能感知和通信的机器人
总而言之,这些进步产生了一种研究人员认为是有史以来第一个能够进行真正决策的亚毫米级机器人。据他们所知,此前没有人将一个包含处理器、内存和传感器的完整计算机集成到如此小的机器人中。这项成就使得这些机器人能够感知其环境并独立做出反应。
这些机器人包含电子温度传感器,可以检测到低至三分之一摄氏度的变化。这种能力使它们能够向温度较高的区域移动,或者报告可作为细胞活动指标的温度值,从而为监测单个细胞提供了一种方法。
报告这些测量结果需要一个富有创意的解决方案。Blaauw说:"为了报告它们的温度测量结果,我们设计了一条特殊的计算机指令,通过机器人执行的小小的‘舞蹈’的摆动来编码一个数值,比如测得的温度。然后我们通过带有摄像头的显微镜观察这个舞蹈,并从摆动中解码出机器人在对我们说什么。这与蜜蜂之间交流的方式非常相似。"
为机器人供电的光线也被用来对它们进行编程。每个机器人都有一个唯一的地址,研究人员可以向不同的单元上传不同的指令。Blaauw补充说:"这开启了一系列可能性,每个机器人都有可能在一个更大的联合任务中执行不同的角色。"
未来微型机器人的平台
目前的机器人只是一个起点。未来的版本可以携带更先进的程序、移动更快、包含额外的传感器,或在更恶劣的环境中工作。研究人员将该系统设计成一个灵活的平台,将稳健的推进方法与可以廉价制造和随着时间推移进行调整的电子元件结合起来。
Miskin说:"这真的只是第一章。我们已经证明,你可以将大脑、传感器和马达放入一个几乎看不见的东西中,并让它存活和工作数月之久。一旦有了这个基础,你就可以在其上添加各种智能和功能。它为微尺度机器人领域开启了一个全新的未来。"
该研究由宾夕法尼亚大学工程与应用科学学院、宾夕法尼亚大学文理学院以及密歇根大学电气工程与计算机科学系进行。研究经费来自美国国家科学基金会(NSF 2221576)、宾夕法尼亚大学校长办公室、空军科学研究办公室(AFOSR FA9550-21-1-0313)、陆军研究办公室(ARO YIP W911NF-17-S-0002)、帕卡德基金会、斯隆基金会以及NSF国家纳米技术协调基础设施计划(NNCI-2025608,该计划支持辛格纳米技术中心),以及富士通半导体。
其他合著者包括宾夕法尼亚大学的Maya M. Lassiter、Kyle Skelil、Lucas C. Hanson、Scott Shrager、William H. Reinhardt、Tarunyaa Sivakumar和Mark Yim,以及密歇根大学的Dennis Sylvester、Li Xu和Jungho Lee。
🚀 想要体验更好更全面的AI调用?
欢迎使用青云聚合API,约为官网价格的十分之一,支持300+全球最新模型,以及全球各种生图生视频模型,无需翻墙高速稳定,文档丰富,小白也可以简单操作。
评论区